산업용 로봇은 다양한 툴을 사용합니다.
이 때, 사용되는 툴의 크기(위치) 및 방향을 입력하는 변수가 로봇의 TCP 입니다.
TCP 는 Tool Center Point 의 약자로써 로봇에 장착된 툴의 위치 및 방향을 정의합니다.
우리가 어떤 위치와 방향을 정의할 때는 기준이 항상 있어야 합니다.
TCP 는 로봇의 Flange 를 기준으로 합니다.
Flange 는 6 축 또는 4축 로봇의 끝단, 툴 부착면을 지칭하는 단어입니다.
앞서 이야기한 TCP의 기준이 되는 Flange 의 좌표계는 일반적으로 원형의 Flange 중심에 원점을 가집니다.
그리고 +Z 방향은 아래 그림과 같습니다.
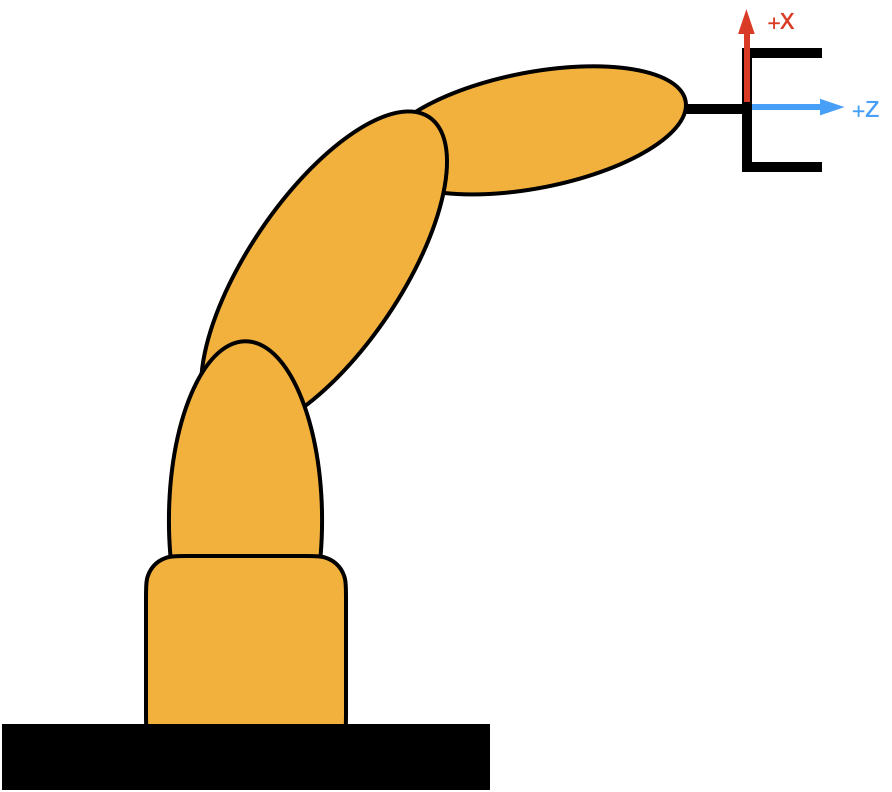
TCP 는 위의 그림에 표기된 Flange 좌표계(끝단)를 기준으로 로봇에 부착된 툴이 갖는 크기와 방향을 입력하게 됩니다.
다음의 예시를 보며 다시 설명 드리겠습니다.
(2차원 그림으로 설명하기 위해 Flange 를 기준으로 XZ 평면을 사용하였습니다.)
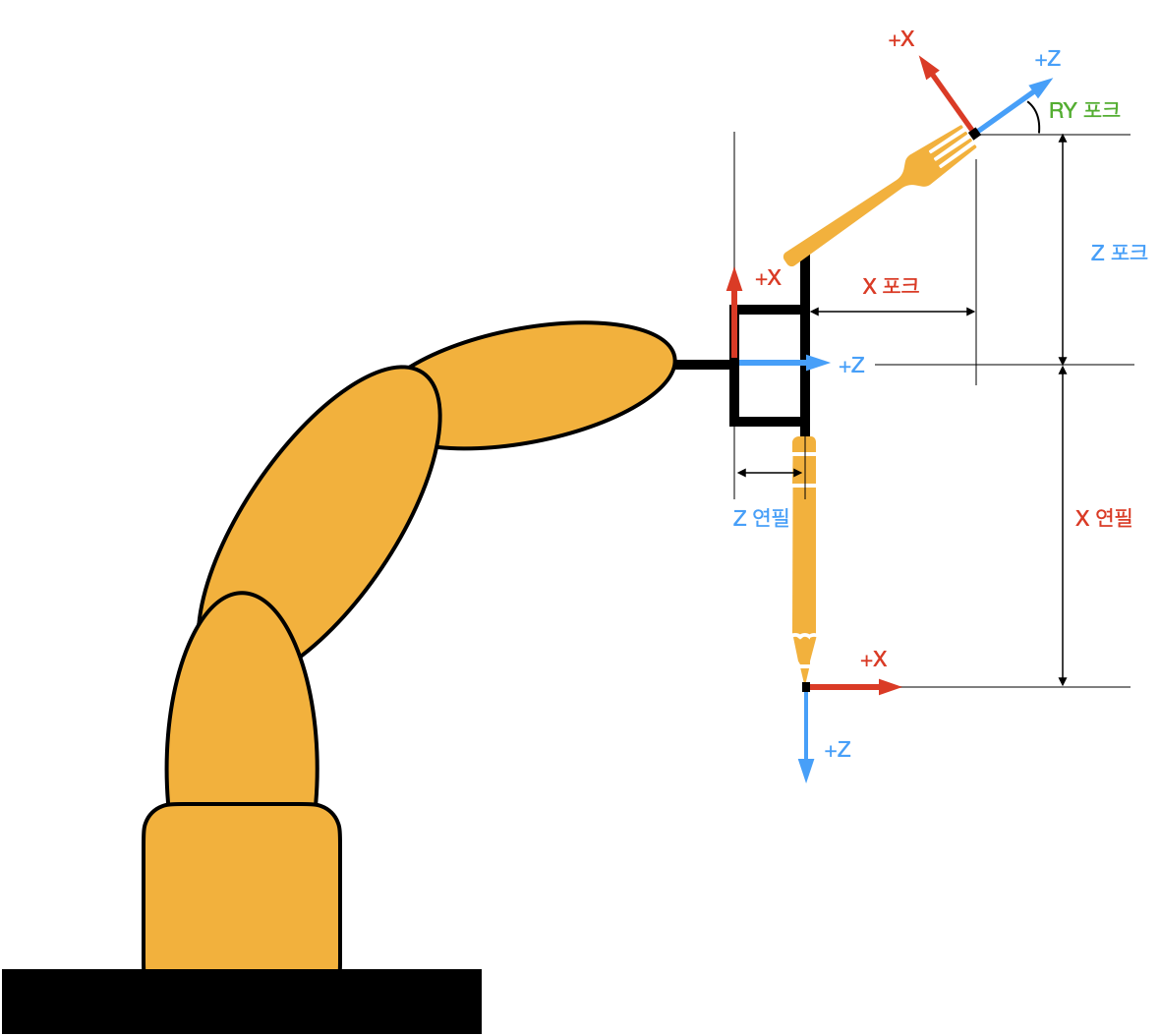
로봇에 2가지의 툴, 연필과 포크를 장착한 경우입니다.
포크의 TCP 는 다음과 같이 정의됩니다.
{X, Y, Z, RX, RY, RZ} = {X 포크, 0, Z 포크, 0, RY 포크, 0}
Flange 좌표계를 기준으로 X, Y, Z 방향으로의 거리를 입력하고 포크가 가리키는 방향을 RX, RY, RZ 를 통해 결정합니다.
아래 그림에서는 X 방향으로 X 포크, Z 방향으로는 Z 포크만큼 이동하였고 Y 방향으로는 변화량이 없으므로 0을 입력합니다.
그리고 포크의 회전 방향은 Y 축으로 기준으로 + RZ 포크 만큼 회전하였습니다.
그리고 연필의 TCP 는 다음과 같이 정의됩니다.
{X, Y, Z, RX, RY, RZ} = {X 연필, 0,- Z 연필, 0, -90 도, 0}
방식은 포크와 동일합니다.
아래 그림에서는 -X 방향으로 X 연필, Z 방향으로는 Z 연필만큼 이동하였고 Y 방향으로는 변화량이 없으므로 0을 입력합니다.
그리고 연필의 회전 방향은 Y 축으로 기준으로 - 90도 만큼 회전하였습니다.
이렇게 TCP 를 정의하는 방식에 대하여 설명을 드렸습니다.
TCP 는 로봇의 동작에 매우 큰 영향을 끼칩니다.
로봇은 TCP 를 기준으로 지정된 위치로 이동하고 속도를 제어하며 회전 중심을 결정하기도 합니다.
다시말하면 TCP 가 부정확하다면 위치, 속도, 회전 모두 오차가 발생한다는 뜻 입니다.
가공품을 로봇에 장착하는 경우, 3D CAD 를 통해 TCP 를 예측할 수 있습니다.
만약 TCP 의 정확한 값을 알기 어렵다면 로봇 메이커에서는 별도의 기능을 제공하므로 담당 엔지니어에게 문의하시어 해결할 수 있습니다.
다음 영상은 정확한 TCP 를 가질 때, 로봇을 TCP 기준으로 회전시키는 동작입니다.
https://youtube.com/shorts/iRbweoPfq6I?feature=share

이상으로 TCP 에 대한 설명을 마치도록 하겠습니다.
'산업용 로봇 기초 > Robotics' 카테고리의 다른 글
| 로봇의 좌표계 (1) (0) | 2023.01.21 |
|---|---|
| 안정화 시간 / Stabilization Time (0) | 2023.01.21 |
| 정확도 (0) | 2022.06.15 |
| 반복정밀도 (1) | 2022.06.15 |
| 6 축 로봇과 4축 로봇 (0) | 2022.05.28 |




댓글